
|
|
ИССЛЕДОВАНИЕ РАБОТЫ ТИРИСТОРНОГО ЭЛЕКТРОПРИВОДА С ДВЕНАДЦАТИ ИМПУЛЬСНОЙ СХЕМОЙ ВЫПРЯМЛЕНИЯ
В мощных электроприводах постоянного тока с целью снижения пульсаций напряжения приложенного к двигателям они питаются от тиристорных преобразователей, соединённых по двенадцатипульсной схеме выпрямления. В этом случае улучшается процесс коммутации машины, уменьшается искажение напряжения питающей сети. Двенадцатипульсная схема предполагает использование двух комплектных тиристорных преобразователей, запитанных от отдельных обмоток трансформатора со сдвигом фаз напряжения между вторичными обмотками 30 электрических градусов, что увеличивает количество пульсов системы до 12 за период. Каждое комплектное устройство имеет свою систему импульсно – фазового управления, систему автоматического регулирования основных параметров привода, систему защиты и сигнализации, и т.д. Преобразователи параллельно работают на общую нагрузку. Схема электропривода предполагает использование одного из преобразователей в качестве ведущего (Master), а остальных – ведомых (Slave). В ведущем преобразователе реализуется система управления электроприводом, выходной сигнал которой является заданием на ток для собственного контура тока, и для контуров тока ведомых устройств. Однолинейная схема включения преобразователей типа Simoreg DC Master по двеадцатипульсной схеме представлена на рисунке 1. 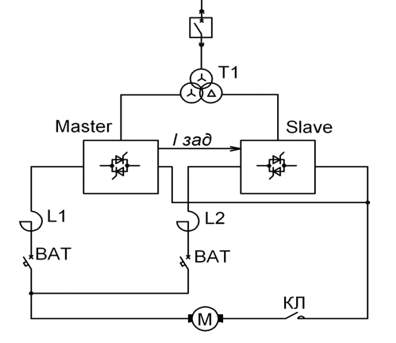 Рисунок №1 По такой схеме была выполнена модернизация привода моталки 6-и клетевого стана холодной прокатки АО «АрселорМиттал Темиртау». В процессе настройки привода выявилась недостаточность динамической компенсации в начальные моменты разгона и торможения, приводящее к провалам и выбросам натяжения на участке полосы между моталкой и шестой клетью. Изменение настроек корректирующих звеньев в процессе наладки не дали ожидаемого эффекта. Для решения этой проблемы было применено математическое моделирование и исследование процессов привода моталки. Динамические процессы привода моталки при параллельном соединении преобразователей протекают своеобразно, т.к. даже незначительные отличия в параметрах электрической цепи и системы управления влияет на динамику токов каждого преобразователя и, в конечном итоге, на суммарный ток. Предположительно в исследуемой системе на ошибку в компенсации крутящего момента двигателя сказывалась задержка передачи сигналов от ведущего к ведомому преобразователю. Эквивалентная электрическая схема силовой цепи исследуемого электропривода приведена на рисунке 2. 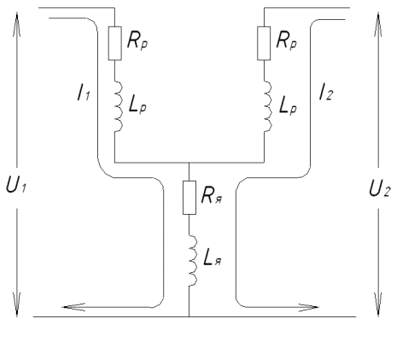 Рисунок №2 Изменение электрических параметров описывается дифференциальными уравнениями: 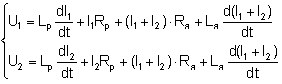 или
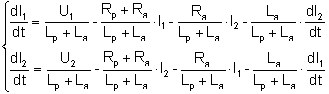 Исходя из уравнения (2), и принятой замены переменных, составим математическую модель электрической части объекта регулирования. Модель приведена на рисунок 3. 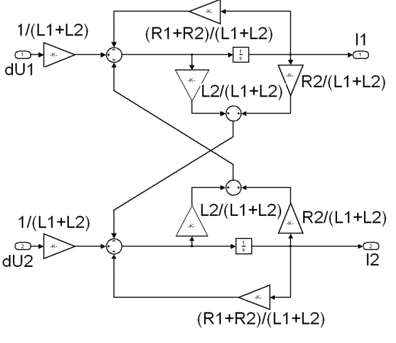 Рисунок №3 где: Используя модель электрической части как составную всей системы, моделируем поведение исследуемого механизма при изменении скорости полосы. Модель электропривода приведена на рисунке 4. 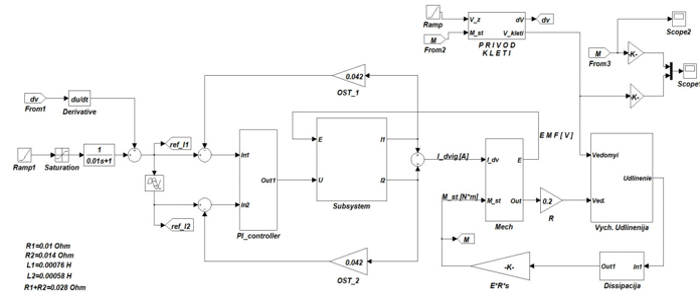 Рисунок №4 Модель электрической цепи двигателя включена в блок «Subsystem», с моделью тиристорных преобразователей, представляющих собой апериодические звенья первого порядка. Регуляторы тока каждого электропривода представлены блоком «PI_controller». Масштабирование обратных связей по току осуществляется блоками «OST_1» и «OST_2». Динамическая компенсация натяжения при изменении скорости клети выполнена блоком дифференцирования «Derivative». Запаздывание в передаче сигнала осуществляется блоком «Transport Delay». Модель механической части электропривода выполнена в субблоке «Mech». Модель полосы на участке от шестой клети до моталки, реализовано в блоке «Vych. Udlinenija». Модель клети представляет собой электропривод бесконечно большой мощности, реализована блоком «PRIVOD KLETI». Моделирование проводилось разными величинами запаздывания передачи сигнала задания тока ведомому преобразователю. На рисунке 5 представлены осциллограммы изменения натяжения в полосе при различном запаздывании в передаче сигнала задания тока. 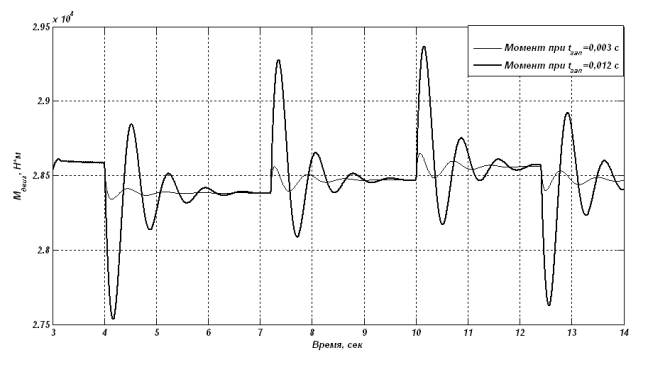 Рисунок №5 Осциллограммы токов электропривода показаны на рисунке 6. Анализ осциллограмм тока: В период времени t1 для верхнего рисунка, и t2 - для нижнего, один из токов несколько уменьшается относительно его предыдущего значения, несмотря на то, что сигнал динамической компенсации направлен на увеличение тока с целью упреждения динамических потерь. Уменьшение тока происходит из–за временной задержки сигнала. Дело в том, что за счёт временной задержки сигнала ток первого преобразователя возрастает быстрее, увеличивая противо–ЭДС для второго преобразователя, что естественно приводит к уменьшению его тока. 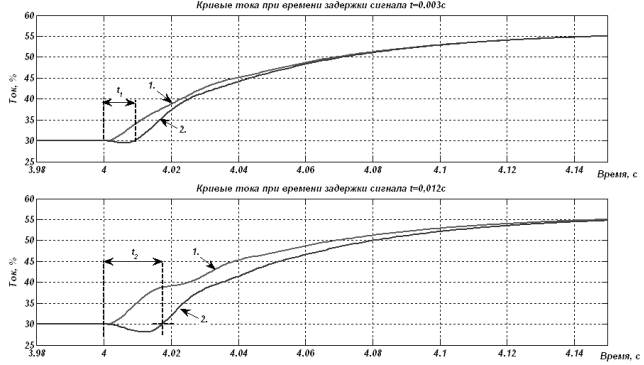 Рисунок №6 В этот период суммарный момент двигателя ниже, что приводит к уменьшению натяжения на участке (см. рисунок 6). Результатом провала натяжения является ряд затухающих колебаний упругой системы. ЗАКЛЮЧЕНИЕ Отклонение момента на валу двигателя моталки в переходных режимах по скорости из-за запаздывания в канале передачи задания тока на тонколистовых станах, когда общее натяжение всего сотни килограмм, это отклонение оказывает отрицательное влияние на качество металла из-за возникающих динамических ударов, а в некоторых случаях может привести к порывам полосы. Устранить эту проблему можно увеличив скорость передачи сигналов до максимально возможного. |
www.rvsa.kz www.rvsa.ru
|