
|
|
СИСТЕМА УПРАВЛЕНИЯ ПРИВОДОМ КАНАТНОЙ ДОРОГИ "КОК-ТОБЕ"
Заказчик: Заказчик:ТОО «Парк Кок-Тобе», г. Алматы.
Для точного подхода вагонов к ста нции и автоматической коррекции вычислен ного пути вагонов (компенсация растяжения тросов при эксплуатации дороги и влиянии температуры) использованы опти ческие датчики BERO. Во время реконстру кции был внесен ряд изменений в кинематическую схему; при этом сохранена цепь аварийных блокировок и тормозов. Существующий рабочий тормоз был демонтирован в связи с тем, что новый двигатель фирмы Siemens мощностью 160кВт имел опционально встроенные электромагнитные дисковые тормоза с функцией ручного растормаживания. 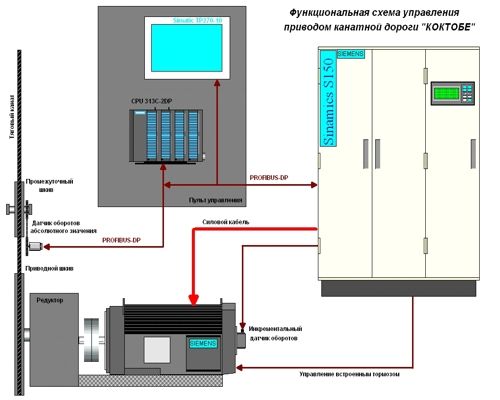 Рисунок №1 Новый пульт оператора не только изменил свои размеры, он стал более компактным; управление движением вагонов сохранило порядок действий оператора, что позволило операторам без затруднений работать с новой системой управления. Одновременно, после модернизации ряд кнопок на пульте был просто удален за ненадобностью. Действия оператора при сборке системы блокируются наличием кнопок «аварийный стоп», «разборка привода», джойстик движения вагонов не в нуле и ключ бирка в положении запрет. Состояния привода, цепей блокировок, сигнализации и положение вагонов можно наблюдать на панели оператора. Панель оператора имеет ряд окон. Окно Оператор служит для отображения: состояний привода, скорости движения вагонов, тока привода, направления движения вагонов, положения вагонов и расстояния вагонов относительно верхней станции. После внедрения частотного привода Sinamics S150 система управления позволяет выполнять задание скоростей непосредственно с панели оператора. Есть два режима работы привода канатной дороги. Это Рабочий режим, позволяющий работать на скоростях, равных рабочим (максимальная скорость 6,3м/сек) и Маневровый режим, позволяющий работать на пониженных скоростях без перестройки рабочего режима. Минимальная скорость, на которой работает канатная дорога после модернизации привода, составляет 0.05м/сек, максимальная 7м/сек.  Рисунок №2 На панели оператора можно выбрать окно Опора, где детально можно рассмотреть подход вагонов к конкретному месту опоры. Причём, как и в окне оператор, в окне опора отображены расстояния вагонов до станции, ток привода, направление движения вагонов, положение вагонов на опоре и скорость движения вагонов. Из любого окна можно войти в окно Обход здесь наблюдается готовность цепочки аварийных блокировок и в случае переподъёма вагона и наезда на аварийный концевой, в этом окне предусмотрен аварийный обход блокировки по одному из концевых для съезда вагона с аварийного концевого.  Рисунок №3  Рисунок №4 Так же из любого окна можно выйти в окно Технолог. В окне Технолог можно просмотреть заданные скоростные режимы для Рабочего режима и Маневрового режима, а также сменить текущий режим. Из окна технолог есть выход в дополнительное окно, в котором разрешено изменение скоростных режимов, ручное обнуление положения вагонов, счетчик числа поездок и функция обхода блокировок скорости для наладки. После модернизации системы управления приводом канатной дороги все звуковые и световые сигнализации были реализованы согласно требованиям эксплуатации. В соответствии с техническим заданием система управления обеспечивает плавность подхода и отхода вагонов от станции в автоматическом режиме, но при этом приоритет управления остаётся за оператором, в любой момент он может взять управление вагонами на себя. До модернизации при движении привода происходил нагрев балластных резисторов в цепи ротора, что приводило к дополнительным потерям электроэнергии. Использование на данном приводе современного частотного преобразователя Sinamics S150 с возможностью рекуперации позволило снизить потребляемую из сети активную энергию и стабилизировать реактив, так как косинус . установлен в режиме компенсации равным 0,96. Использование дополнительного маневрового двигателя при профилактике и ремонтах на данной системе стало нецелесообразным. Поэтому маневровый двигатель используется в аварийных случаях при отключении электроэнергии и работе от автономного источника питания. |
www.rvsa.kz www.rvsa.ru
|